자칼 탑재 전 테스트용! 2022.11.09
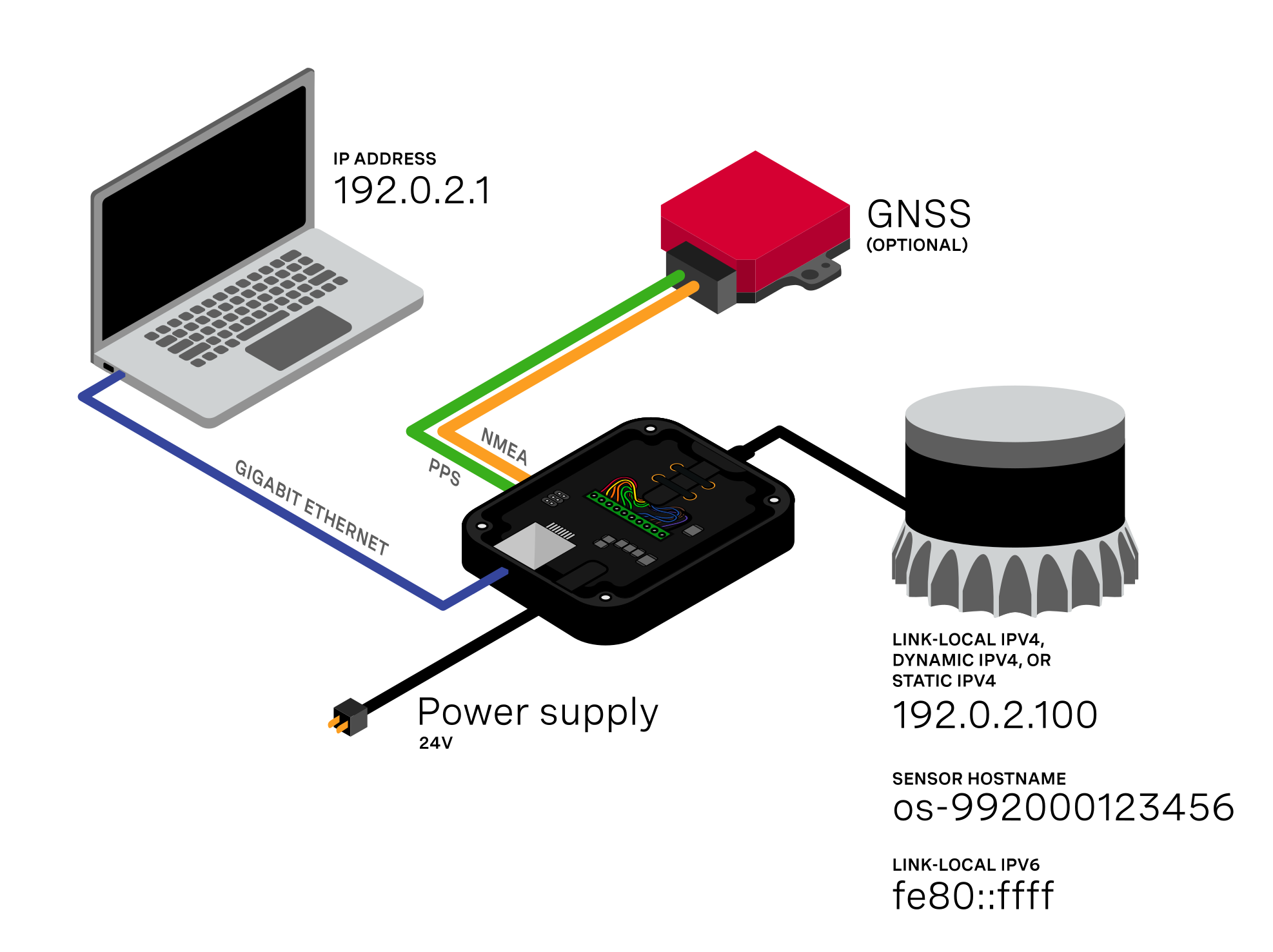
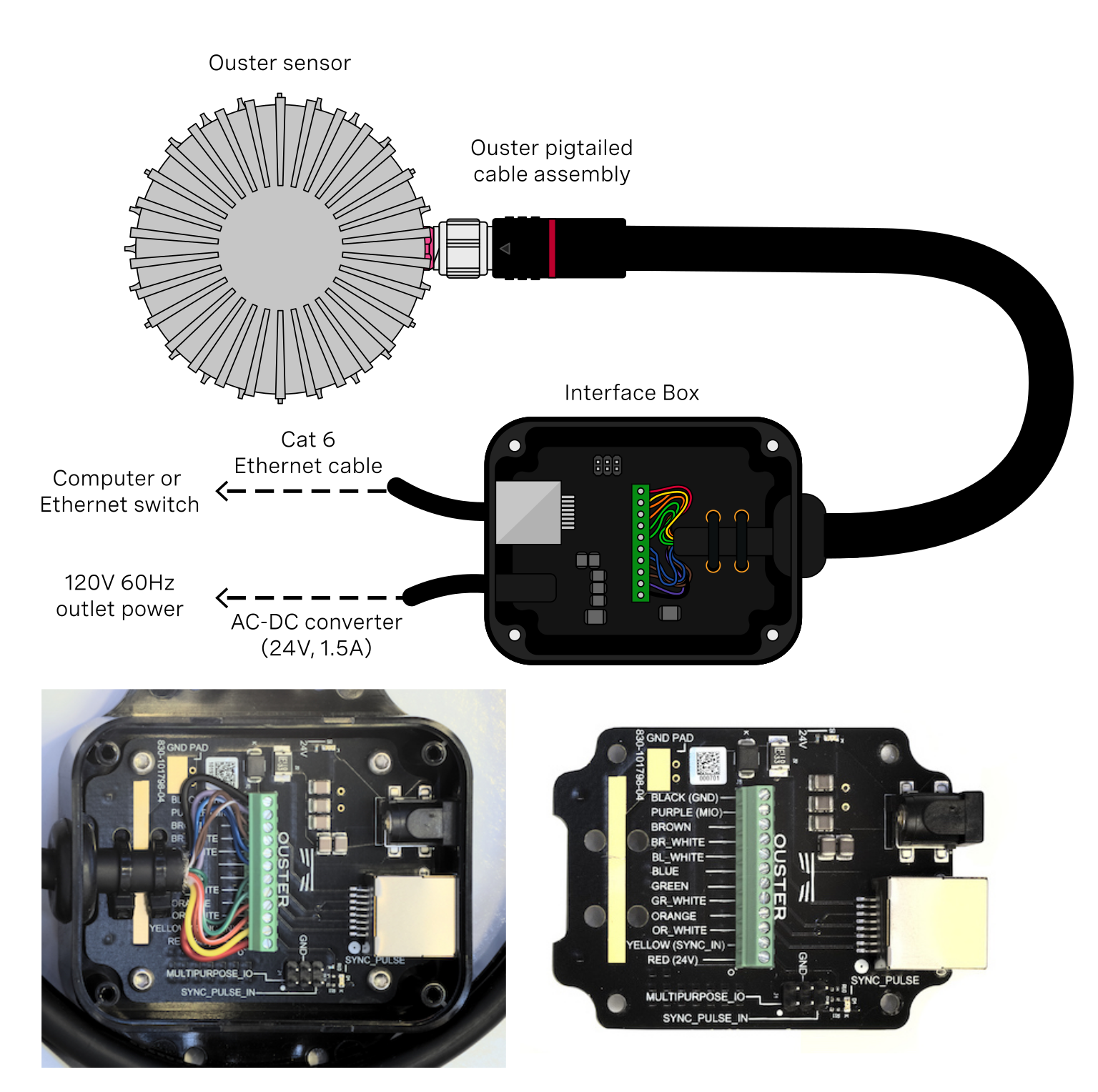
1. 하드웨어 연결
💡
Serial Number : xxxxxxxxxxxx(12자리 정수)
2. 네트워크 세팅
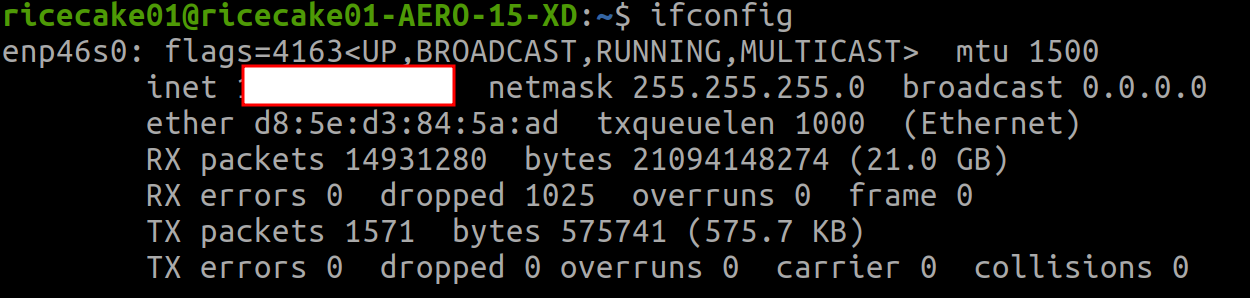
박스쳐진 부분이 해당 포트의 IP주소, enp46s0이 포트의 이름!
sudo ip add flush enp46s0
ip addr show dev enp46s0
- PC의 IP를 설정해 준다.
sudo ip link set enp46s0 up
sudo ip addr add 192.168.0.23/24 dev enp46s0
- 센서의 IP를 설정한다.
sudo dnsmasq -C /dev/null -kd -F 192.168.0.0,192.168.0.100 -i enp46s0 --bind-dynamic
192.168.0.33이 DHCP에서 할당받은 센서 IP이다.
⭐ 라우터의 DHCP 기능 쓰면 쉽다
3. ROS 드라이버 설치
필요한 요소 미리 설치
$ sudo apt install -y \
ros-$ROS_DISTRO-pcl-ros \
ros-$ROS_DISTRO-rviz \
ros-$ROS_DISTRO-tf2-geometry-msgs
$ sudo apt install -y \
build-essential \
libeigen3-dev \
libjsoncpp-dev \
cmakecatkin_ws, src 폴더는 미리 만들었다고 가정한다.
~/catkin_ws/src 경로에서 진행한다.
$ git clone --recurse-submodules https://github.com/ouster-lidar/ouster-ros.git
$ cd ~/catkin_ws
$ catkin_make --cmake-args -DCMAKE_BUILD_TYPE=Release드라이버 설치 후, 네트워크 주소(센서, 클라이언트) 주소를 ouster_ros/launch/sensor.launch 에서 수정한다.

$ roslaunch ouster_ros sensor.launch 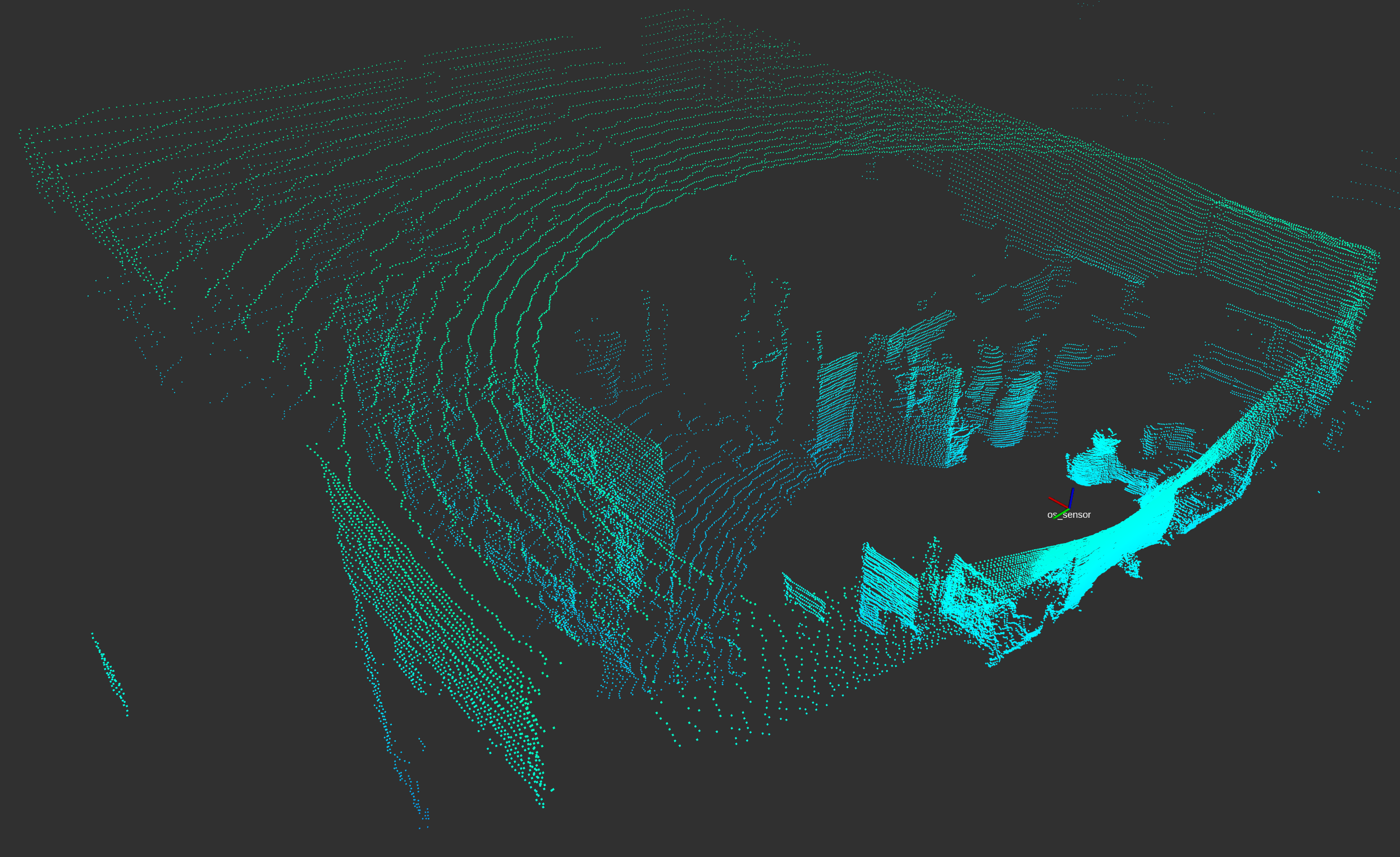


참고자료
https://github.com/ouster-lidar/ouster-ros
[LIDAR #1] Ouster OS-1 ROS 토픽 받기
라이다(LIDAR)는 레이저 펄스를 발사하여 그 빛이 대상 물체에 반사되어 돌아오는 것을 받아 물체까지의 거리를 측정하는 센서자율주행의 핵심 센서 중 하나로, 대표적인 회사로 Velodyne, Ouster가 있음본 포스팅에서는 Ouster 회사의 OS-1 32ch 기준으로 작성됨 [2] ethernet IP set up * 필요 시, sudo apt install net-tools 그림 2.
 https://m.blog.naver.com/iphone7743/222302087603
https://m.blog.naver.com/iphone7743/222302087603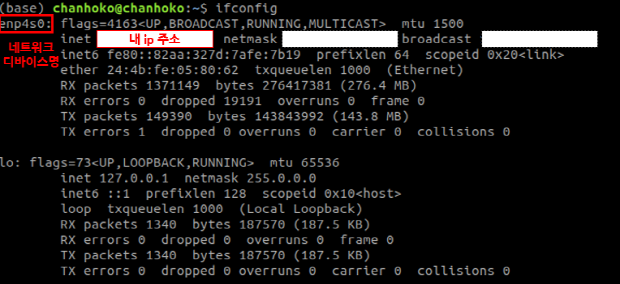
Ouster Lidar : OS1-64 우분투 ROS 환경에서 설정하기
안녕하세요. 본 아우스터사에서 만들어진 라이다 OS-1 64는 64채널의 레이어를 갖고 있는 라이다 센서입니다. 자율주행자동차에서 SLAM을 수행하기위해 필수적인 센서인 LiDAR를 UBUNTU PC와 연결하여 데이터를 시각화 하는 과정을 소개하겠습니다. 컴퓨터 환경은 Ubuntu 18.04 / ROS melodic / legion 530y 입니다. 본 글은 다음의 내용을 중심으로 전개합니다. https://github.com/ouster-lidar/ouster_example ouster-lidar/ouster_example Ouster sample code.

Developer's Quick Start with the Ouster Python SDK - Ouster Sensor SDK 0.5.1 documentation
This quickstart guide will walk you through visualizing Ouster sensor data quickly with Python code you write yourself. It assumes that you have followed the steps in Python Installation to install the Ouster Python SDK.
https://static.ouster.dev/sdk-docs/python/quickstart.html
Ouster Download Center | Ouster
To update the firmware of any Ouster sensor, follow these steps: Download the newest firmware image. Make sure the sensor is on a network with a DHCP server and has gotten a DHCP lease.
 https://ouster.com/downloads/
https://ouster.com/downloads/
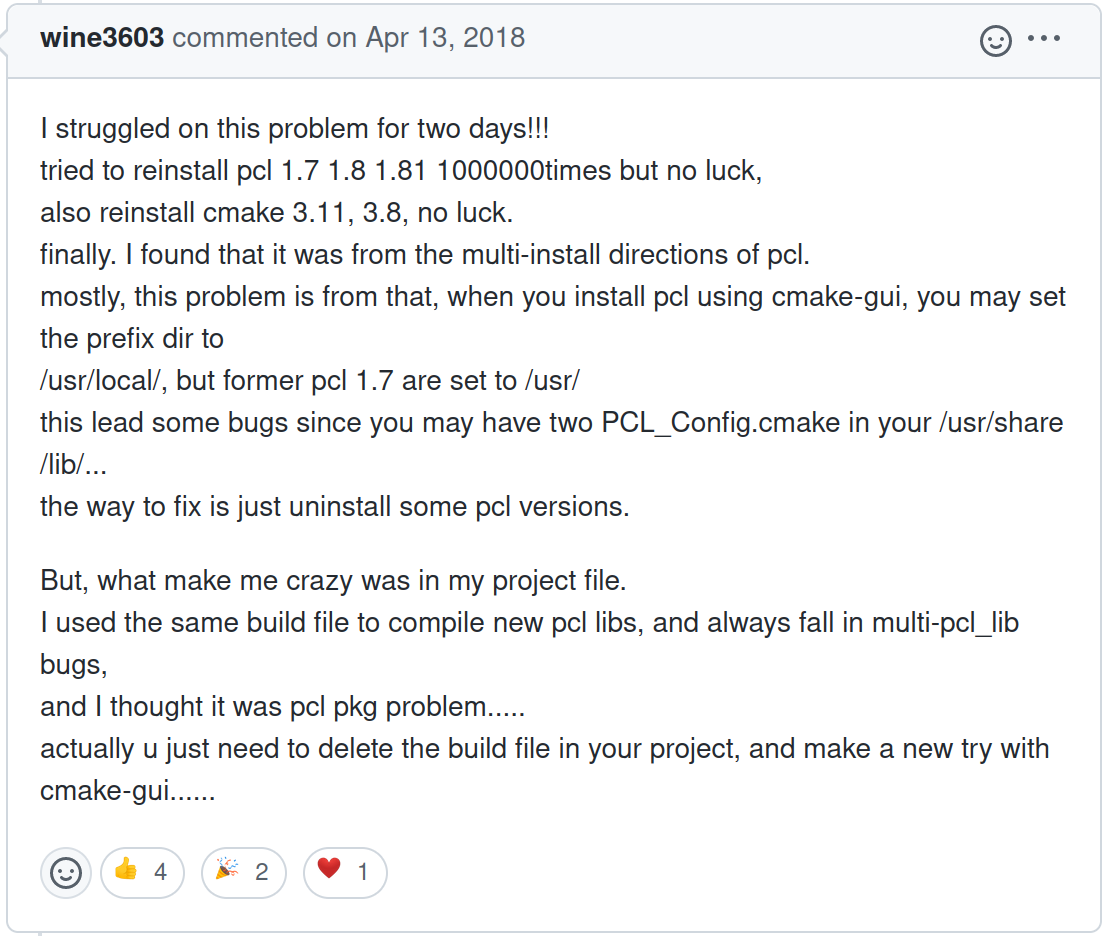
make[2]: *** No rule to make target '/usr/lib/x86_64-linux-gnu/libpcl_common.so', needed by '/home/cake1/catkin_ws/devel/lib/libouster_ros.so'. Stop.
!!!!! pcl은 커맨드라인으로 받은 것 말고 별도로 굳이 설치하지 말자,,,
pcl 버전 문제때문에 1주일이 날아갔다 😢
Uploaded by N2T
'Study > 각종 세팅' 카테고리의 다른 글
| SENNHEIZER Profile microphone ROS 드라이버 셋업 (2) | 2024.06.05 |
|---|---|
| FLIR BFS 카메라 ROS 드라이버 셋업 (0) | 2023.07.13 |
| 렌즈 공부하기 - FoV, 문자 뜻 (0) | 2023.03.14 |


