https://github.com/uzh-rpg/e2calib
@InProceedings{Muglikar2021CVPR,
author = {Manasi Muglikar and Mathias Gehrig and Daniel Gehrig and Davide Scaramuzza},
title = {How to Calibrate Your Event Camera},
booktitle = {{IEEE} Conf. Comput. Vis. Pattern Recog. Workshops (CVPRW)},
month = {June},
year = {2021}
}
설치는 두 과정으로 나뉘어진다.
- Installation of packages for the conversion code that must be completed outside of any virtual environment for compatibility reasons.
- Installation of packages in a conda environment to run the reconstruction code.
1. Installation: Outside of conda
git clone https://github.com/uzh-rpg/e2calib
cd e2calib
pip3 install --no-cache-dir -r requirements.txt
pip3 install dataclasses # if your system Python version is < 3.7
2. Installation: inside of conda
cuda_version=10.1
conda create -y -n e2calib python=3.7
conda activate e2calib
conda install -y -c anaconda numpy scipy
conda install -y -c conda-forge h5py opencv tqdm
pip install python/ # this installs e2vid
Calibration 과정
- Conversion of different event data files → hdf5 format.
- Reconstruction of images at a certain frequency from this file using E2VID (Requires the activation of the conda environment e2calib.)
- Calibration using your favorite image-based calibration toolbox.
0. Acquisition
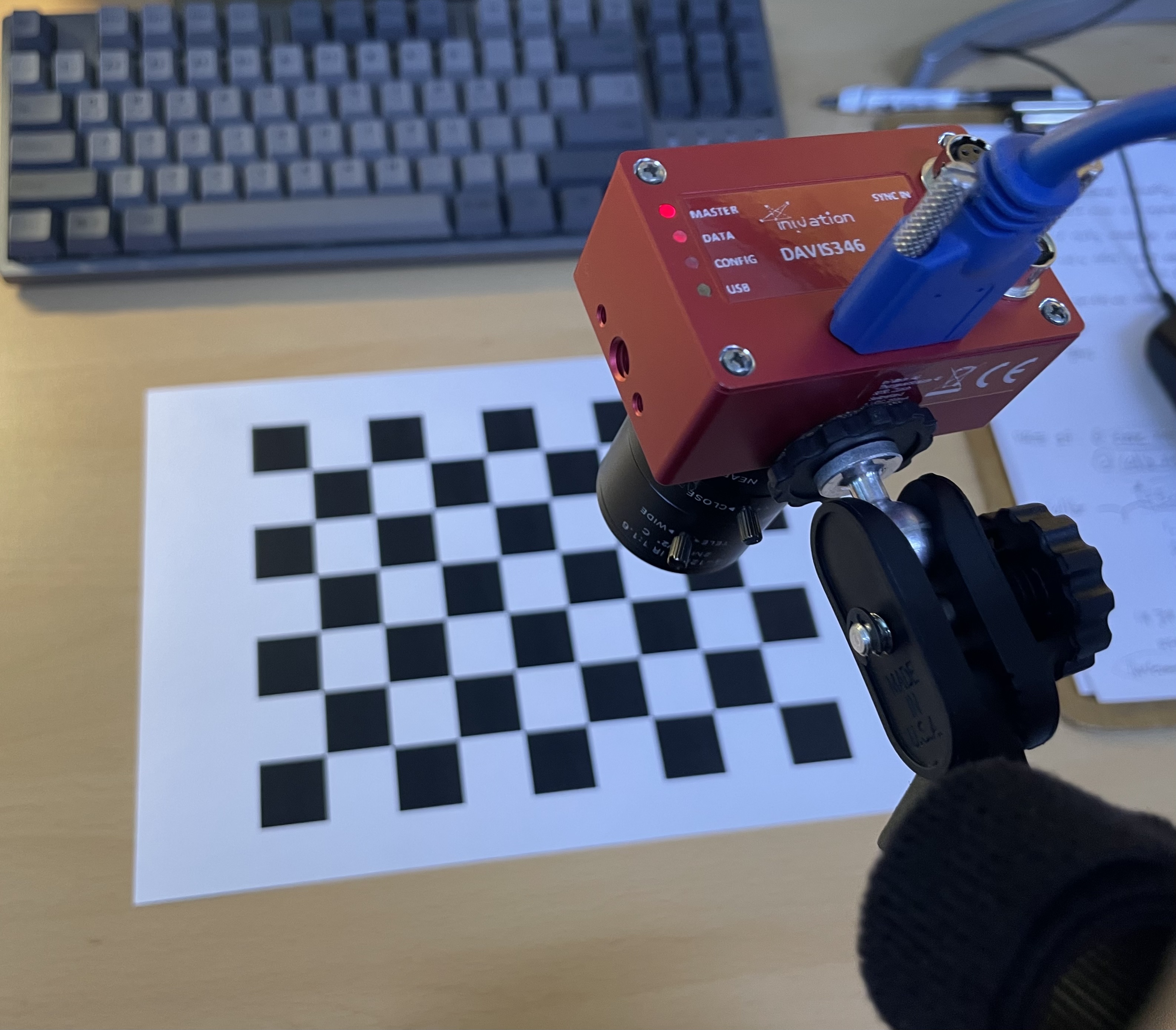
roslaunch dvs_renderrer davis_mono.launch #연구실에서 쓰는 모델이 davis346_mono라서.
rosbag record /dvs/event1. Conversion: bagfile → h5 format
오류 해결 과정
증상

해결
- try-except에서 인식을 못하니 처음에 그냥 받아온다.
- rospkg가 없다고 하니 받는다.
pip3 install rospkg
- Cryptodome이 없다고 하니 받는다.
pip3 install pycryptodomex
- gnupg가 없다고 하니 받는다.
pip3 install gnupg
convert.py 정상작동!

cd e2calib/python
python convert.py /path/to/rosbagfile.bag # rosbag이 있는 위치에 따라서 조정/e2calib/python/convert.py 를 사용해 rosbag→h5 파일로 변환한다.

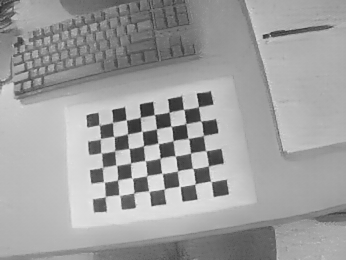
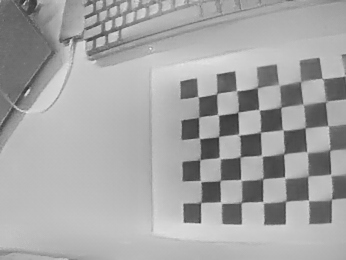
2. Reconstruction: event→img
- event→img reconstruction에는 h5 file이 필요하다.
조정 가능 요소
- height, width: reconstructed image’s size
- freq_hz: the frequency at which the image reconstructions will be saved FIXED FREQUENCY → useful for intrinsic calibration!
- upsample_rate: option to multiply the reconstruction rate i.e. setting this value to 3 will lead to 3 times higher reconstruction rate BUT does not influence the final number of reconstructed images that will be saved.
cd e2calib/python
python offline_reconstruction.py --h5file ../calib_test_00.h5 --freq_hz 5 --upsample_rate 4 --height 260 --width 346- DAVIS 346 model’s resolution: 346(width) x 260(height)
3. Calibration
매트랩을 사용하거나 제시하는 kalib 같은 다른 방법을 찾자.
아무 칼리브레이션 툴을 사용해도 좋다.
Uploaded by N2T
'Study > event-based camera' 카테고리의 다른 글
| E2VID 설치 및 사용 (0) | 2023.01.12 |
|---|---|
| HASTE 설치 (0) | 2023.01.12 |