본 프로젝트는 2021년 2학기에 수강한 [기초제어실습] 강의 프로젝트를 진행하면서 기록한 노션 글을 정리한 것이다.
당시에 작성한 보고서를 올릴 수 있으면 좋으련만 아쉽다.
Wall Following

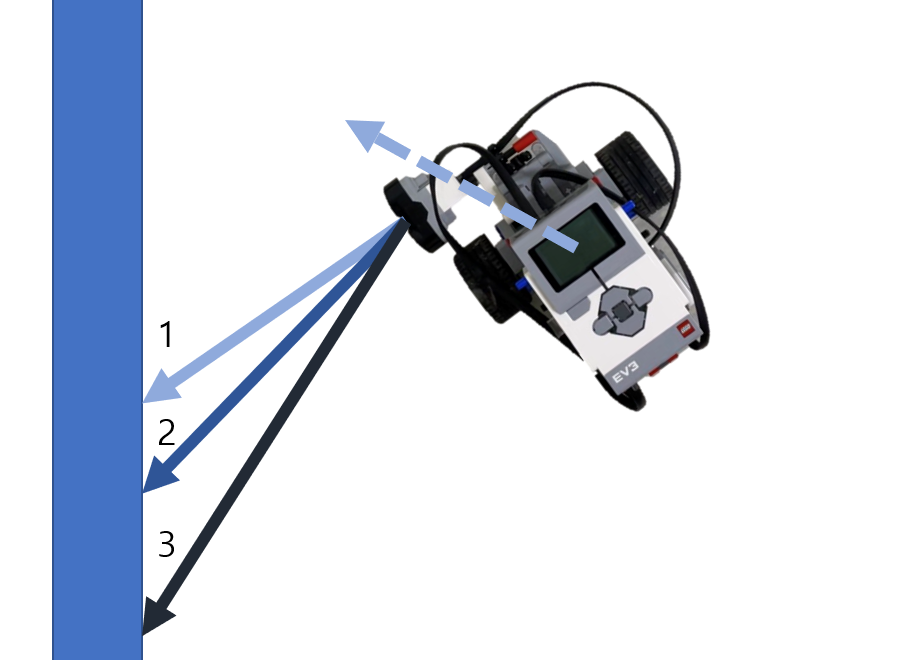
간단하게 벽을 바라보는 초음파 센서의 데이터와 PID 제어를 써서 벽을 도는 로봇을 구동하고, 보고서로 정리하는 과정이다.
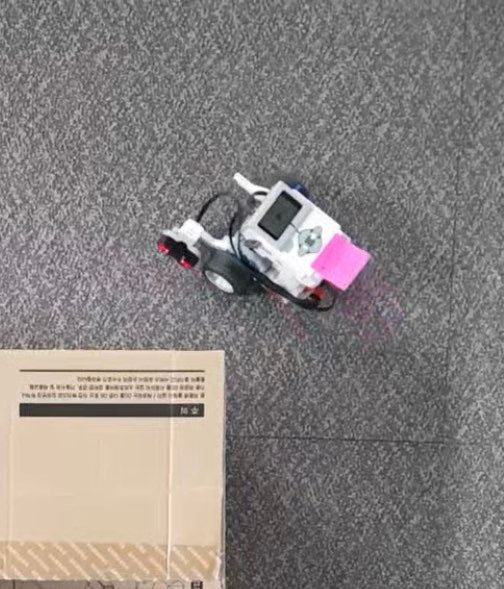
Line Tracer


바닥을 향해 보고있는 적외선 센서 하나의 데이터와 PID 제어를 사용해 최대한 빠르게 경로를 따라가는 로봇을 만드는 것이다.
Uploaded by N2T
'Projects > 2021년 기초제어실습' 카테고리의 다른 글
| Line Tracer-코드 정리 (0) | 2023.01.03 |
|---|---|
| Line Tracer-센서 데이터 그래프 생성 (0) | 2023.01.03 |
| wall follower-실험용 코드 (0) | 2023.01.03 |
| wall follower-코드 정리 (0) | 2023.01.03 |
| wall follower- 센서 데이터 그래프 생성하기 (0) | 2023.01.03 |